


DC Gear Motor Characteristics
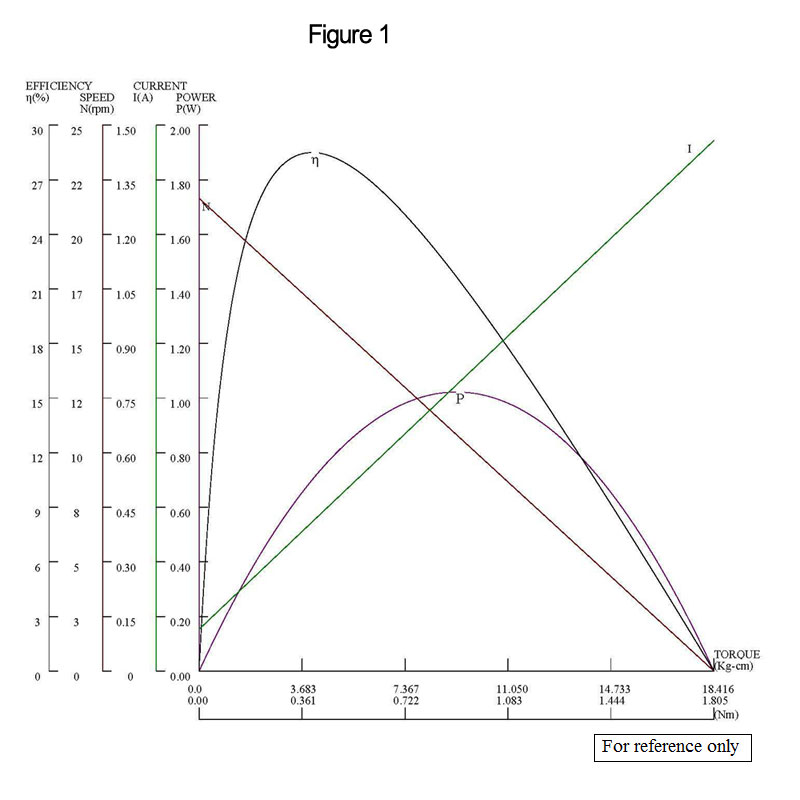
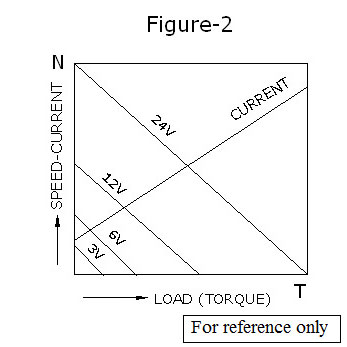
The relationship between torque (T), speed (N), current (I), efficiency (E), and output power (P), as below figures shown, represents the characteristics of a Hennkwell micro DC gear motor. Figure-1 shows how the loaded torque on the gear motor is in proportion and is directly related to the output speed and current. Figure-2 shows how the no-load speed and starting torque also change proportionally to a different supply voltage. The output speed at a given voltage is parallel to those at other voltage.
As the load on the gear motor increases, speed will decrease accordingly. Additionally, the current (I) is an inverse relationship to torque. The peak of output power (P) and efficiency (E) exist at different torque points, as indicated in figure-1. Output power presents a curve by torque while efficiency (E) decreases straight down beyond the peak normally. Maximum output (Pmax) is at half the starting torque (Ts) point and maximum efficiency exists at a much lower point of torque. A gear motor's basic rating point is lower than its maximum efficiency point. Load torque can be determined by measuring the current drawn when the gear motor is installed in a machine where actual load value is known.
Moreover, the actual operating load torque must be selected lower by a few times than the stall torque. The purpose is to prolong the motor’s life and to bring out the most optimal performance. Besides the full load torque has to operate within the maximum allowable torque limit, although the gear motor could produce an over torque.
The maximum efficiency is generally much lower than the maximum stalled torque, because although the motor can operate at a higher torque than the maximum efficiency torque, it can also shorten the motor’s life due to high current generated. Thus, selecting a motor with a torque that is several times higher than the actual operating torque is strongly recommended.
- Related Products

Dia. 22mm DC Planetary Gear Motor
PK22 Series
We manufacture and supply dia. 22mm dc gearmotors with supply voltage from 6VDC to 24VDC and output speed range 1rpm to 1000rpm to fit your applications such as medical device, bank equipment, medical instruments, robot kits, automatic blinds, robotics, safety equipments, electric locks, communication equipments, traffic machines, household automatic equipments, business equipments, power tools, vending machines, ticket dispenser, electric valves and small actuators. Our Φ22mm series dc planetary gear motor can also be assembled with magnetic encoder.

Dia. 32mm Gearbox Motor
PK32 Series
According to customer diversity dc gear motor requirements, Hennkwell PK32 series offer several cored brush motor types for evaluation. Dia. 32mm series have standard dia. 6mm and dia.8mm D-cut output shaft for choice. We can adjust our dc tubular motor speed and gear ratio to meet with your need. We also produce 12PPR magnetic encoder to assemble with our Φ32 series dc generator motor.

Dia. 38mm DC Reduction Motor
PK38 Series
Our dia.38mm dc gearmotor can combine various spec. motors with a wide of range reduction gearboxes to obtain your required output speed and torque. Lead wires, magnetic encoder and custom-made output shaft are also available.

Dia. 22mm DC Coreless Planetary Gear Motor
22mm coreless Series
Hennkwell DC coreless motors are available in 22mm diameter can assemble with our dia.22mm planetary gearbox or encoder to meet most application requirements. Its quick response, higher efficiency, no cogging, low inertia, low noise & vibration, longer life features are perfected choice for medical device, small pumps, document handing/dispending equipment, banking and office automation, robotics, security and access and other products.