Techniczny
FAQ
Hennkwell integruje wewnętrzną produkcję własnych silników i przekładni z ponad trzydziestoletnim doświadczeniem w branży, oferujemy również dostosowanie do potrzeb klienta.
Silniki z przekładnią DC są stosowane w wielu urządzeniach, nie tylko w sprzęcie domowym, ale także w zastosowaniach komercyjnych. W różnych warunkach pracy możemy dostosować parametry naszego silnika, aby osiągnąć maksymalną wydajność.
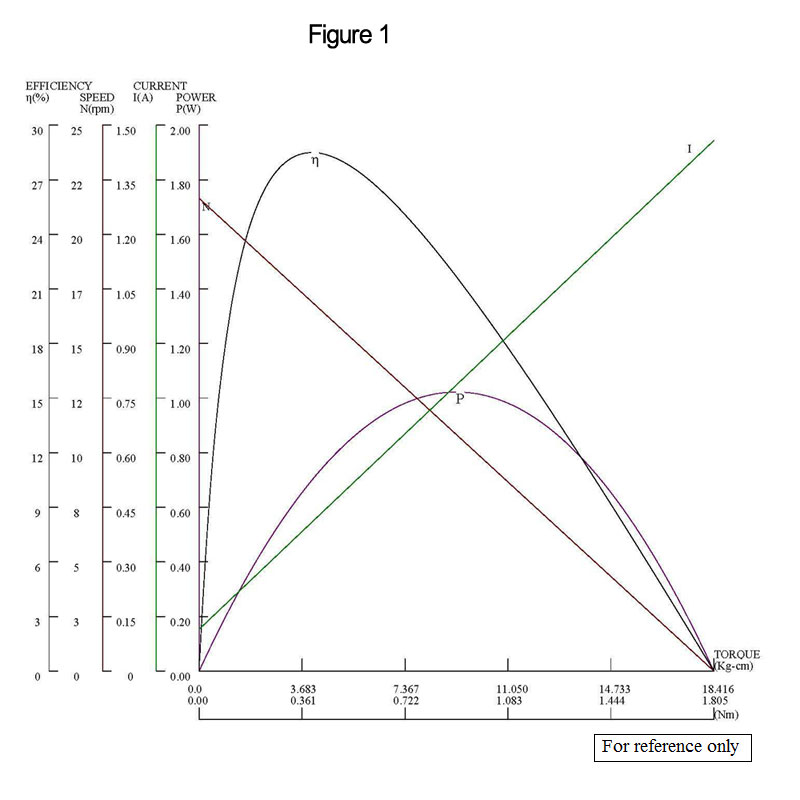
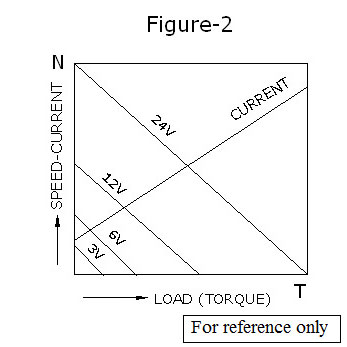
Relacja między momentem obrotowym (T), prędkością (N), prądem (I), sprawnością (E) i mocą wyjściową (P), jak pokazują poniższe figury, przedstawia charakterystykę mikrosilnika z przekładnią prądu stałego Hennkwell. Rysunek-1 pokazuje, jak moment obciążenia na silniku zębatkowym jest proporcjonalny i bezpośrednio związany z prędkością wyjściową i prądem. Rysunek-2 pokazuje, jak prędkość bez obciążenia i moment rozruchowy również proporcjonalnie zmieniają się w zależności od różnego napięcia zasilania. Prędkość wyjściowa przy określonym napięciu jest równoległa do prędkości przy innych napięciach.
W miarę wzrostu obciążenia silnika przekładniowego, prędkość będzie odpowiednio maleć. Dodatkowo, obecny (I) jest odwrotnym stosunkiem do momentu obrotowego. Szczytowa moc wyjściowa (P) i efektywność (E) istnieje przy różnych punktach momentu obrotowego, jak pokazano na rysunku-1. Moc wyjściowa przedstawia krzywą w zależności od momentu obrotowego, podczas gdy sprawność (E) normalnie spada prosto w dół poza szczytem. Maksymalna moc wyjściowa (Pmax) występuje w połowie punktu momentu rozruchowego (Ts), a maksymalna wydajność występuje w znacznie niższym punkcie momentu. Podstawowy punkt oceny silnika zębowego jest niższy niż jego punkt maksymalnej wydajności. Moment obciążenia można określić, mierząc prąd pobierany, gdy silnik z przekładnią jest zainstalowany w maszynie, w której rzeczywista wartość obciążenia jest znane.
Ponadto, rzeczywisty moment obciążenia roboczego musi być wybrany niższy o kilka razy niż moment obrotowy przy zatrzymaniu. Celem jest wydłużenie życia silnika i osiągnięcie optymalnej wydajności. Ponadto, moment obciążenia nominalnego musi działać w granicach maksymalnego dopuszczalnego momentu obrotowego, chociaż silnik przekładniowy może generować nadmierny moment obrotowy.
Maksymalna wydajność jest zazwyczaj znacznie niższa niż maksymalny moment zatrzymania, ponieważ chociaż silnik może działać przy wyższym momencie niż maksymalny moment wydajności, może to skrócić żywotność silnika ze względu na generowany wysoki prąd. Dlatego zdecydowanie zaleca się wybór silnika o momencie kilkakrotnie wyższym niż rzeczywisty moment pracy.